スマホのアプリやネットゲームで、コンピュータとオセロゲームをした人は多いかもしれません。しかし、実体のあるロボットとゲーム盤を使い、オセロゲームをした人は、なかなかいないのではないでしょうか。
機械工学科の林研究室では、「オセロをするロボット」の開発が進められていました。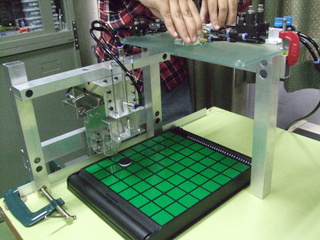
上画像の装置は学生オリジナルのもので、ゲーム盤の上に設置されます。コマの大きさに合わせたパイプにコマを吸い込み、器用にひっくり返す様子はお見事です。後々、産業用のロボットアームに接続し、コンピュータの指示に従って動くようにするそうです。こちらの製作は野村洋祐さん、福井俊平さんが担当しました。
一方、ロボットに指示を出すためのプログラムと、コマを認識するカメラの調整をしているのが新江航さん、藤野祥也さんです。カメラでとらえた盤上のコマの位置を認識し、コンピュータが最善の手を考えます。

今はまだ別々に製作が進められていますが、いずれシステムとロボットアームを接続し、ロボットとのオセロ対決が可能になるそうです。果たして開発はどこまで進んでいるのでしょうか?こちらの研究の発表はいよいよ来週、2月4日(月)です。興味のある方はぜひ聞きに来てください。
野村 洋祐
福井 俊