KITロボティクス学科は、ロボティクス並びに機械を中心に電気・電子,情報などを統合した機械システムの技術者として基礎知識と基盤技術を習得した人材を育成することおよび大学と地域が連携して住み良く快適で安心安全な生活環境を創造してゆくことを目標に、教育研究活動に取り組んでいます。
この度、高校や地域のみなさんにロボティクス学科の学生がどのような活動をしているのかを知っていただくために、下記の日程で現4年生が全員参加する工学設計Ⅲ(卒業研究)の公開成果発表会(ポスター発表ならびに成果物のデモ・展示)を開催致しますので,この機会に是非お越しください。
|
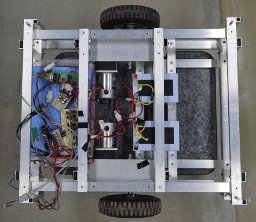
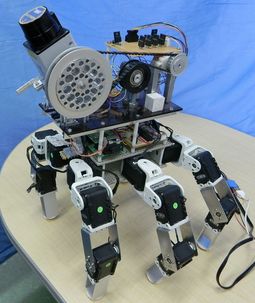
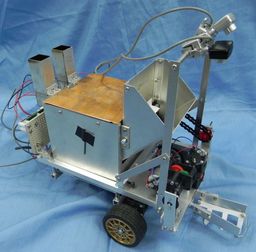
土居研 左: 不整地の凹凸を計測するセンサを搭載した6脚歩行ロボット.地形に適応しつつ,胴体の軌道を指定して歩行することができる.地形の3次元計測も可能. 右: 枯葉を集めて燃やし,エネルギーを取り出すロボット.2台のカメラで枯葉を発見し,色で選別して集めることができる. |
||
|
出村研 ロボカップヒューマノイドリーグ用に設計した大型ロボット。全高166cm, 重量50kg。歩行制御は予見制御を用いている。当日は実機を展示する予定。また、これとは別に走る能力を持つヒューマノイドロボット用脚モジュールも開発した。下のビデオをご覧ください。 |
||
|
  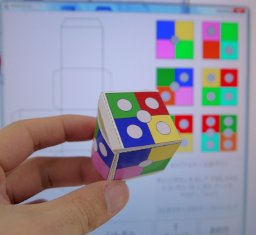
光永研 左:人を乗せて案内するロボット。体重 80kg までの人を乗せて移動できます。 中:空気圧を用いたロボットハンド。ピンが均等な力で包んでものをつかみます。 右:立体の理解に向けたサイコロ作成知育ソフトウェア。自分だけのサイコロを作成できるソフトウェアです。 |
||
|
|
|
|
|
|
|
|
|
|
|
|

|
土居研 左: 不整地の凹凸を計測するセンサを搭載した6脚歩行ロボット.地形に適応しつつ,胴体の軌道を指定して歩行することができる.地形の3次元計測も可能. 右: 枯葉を集めて燃やし,エネルギーを取り出すロボット.2台のカメラで枯葉を発見し,色で選別して集めることができる. |
||
|
出村研:ロボカップヒューマノイドリーグ用に設計した大型ロボット。全高166cm, 重量50kg。歩行制御は予見制御を用いている。当日は実機を展示する予定。 |
||
|
・左:人を乗せて案内するロボット。体重 80kg までの人を乗せて移動できます。 ・中:空気圧を用いたロボットハンド。ピンが均等な力で包んでものをつかみます。 右:立体の理解に向けたサイコロ作成知育ソフトウェア。自分だけのサイコロを作成できるソフトウェアです。 |
||
|
|
|
|
|
|
|
|
|
|
|
|
コメントする