河合研究室
河合研究室
「目で見て動くロボット」づくりに挑戦中医用工学への応用もできる視覚制御理論
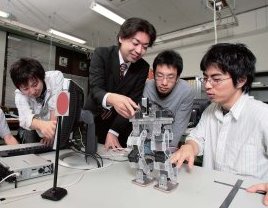
研究室では、まずはじめに視覚センサを搭載した自律型歩行ロボットを製作
法政大学IT研究センターでカメラによる監視システムの開発に携わっていたという河合宏之先生。本来の専門は「眼に見える情報」を数値化し、コンピュータに自動認識・処理させる視覚制御理論。2006年度にスタートしたばかりの若い研究室では、そのアルゴリズムをロボットに応用したモノづくりに取り組んでいる。
「たとえば腹腔鏡手術などに使われる手術用ロボット。現在は医師の指示に従って助手が操作しているんですが、アームの先端にカメラを取り付け、医師の視野に連動して動くシステムとその制御方法を研究しています」。いわゆる「医用工学」に近いイメージだが、ベースはあくまで視覚情報にもとづく「制御」の理論と技術。単に「見える」だけでなく、動きそのものを自動的にコントロールする仕組みづくりが大きな狙いであり、河合研究室のオリジナリティでもある。
研究室の学生たちが最初に取り組むのは視覚センサからの情報で周囲の状況を認識し、自ら障害物を避けて動く自律型歩行ロボットの製作。
「今まではどちらかというと理論中心で、あまりモノづくりをしたことがないんです」と苦笑いする河合先生だが、1年目の成果はまずまずと自己評価。さらにノウハウを蓄えつつ、今年度からは顕微鏡レベルの作業を行う細胞注入ロボットや、目の届かない場所で自律的に動く災害救助ロボットなどの研究にも着手していく予定だ。
「KITはモノづくりをベースとする大学ですから、ここに来て自分自身の志向性も大きく変わりました。今は視覚制御の理論をいかに『人に役立つモノづくり』へ応用していくかが一番の課題ですね」。聴覚や触覚に比べると圧倒的に情報量が多い視覚のモデル化は電気電子工学科や心理情報学科などとの連携も期待される。何より、KITではユニークな医用工学系研究室として近年、受験生たちの関心が高まる医療・医学との境界領域へも進出可能だ。未知なる分野への可能性を秘めた研究室なのだ。
ビデオ
| ステレオカメラによる自律走行走[ここをクリック] 車両にステレオカメラを載せ,白線内の走行と障害物回避といった自律走行を目指した研究です.車両は実際の自動車の大きさ(縦横比,軸間距離など)を縮小した設計になっています.動画は白線の外にある車両が白線を認識し,白線内を走行するプログラムの実験です. |
| 腹腔鏡把持ロボット[ここをクリック] 外科手術用の腹腔鏡把持ロボットと同じ構造を持つ2自由度ロボットアームです.動画では,パソコン上を移動する観測対象をカメラの中心で捕らえるようにロボットアームを制御しています.鉗子に取り付けた観測対象を自動追尾することを想定しており,これにより手術の際に必要な視野を自動的に確保することが可能になります. |
トラックバック(0)
トラックバックURL: http://kitnetblog.kitnet.jp/mt/mt-tb.cgi/252
コメントする