藤木研究室
藤木研究室
興味の対象は「動くモノ」とリモートコントロール人間の手足となって働くロボットづくりを目指して
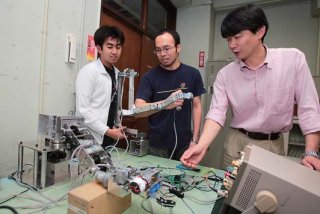
バイラテラルサーボ機構を組み込んだ遠隔操縦装置
二本足で歩いたり、自分で判断をしたり、「人間と同じこと」ができるロボットと、宇宙空間や海底などで「人間ができないこと」をするロボット。大きく分けると、ロボット研究には二つの方向性がある。企業で工場の生産ラインなどに利用される産業用ロボットの開発に携わってきた藤木信彰先生の立場は明らかに後者。KITにおける研究対象は、人間が立ち入れない場所で遠隔操作によって動くロボットハンドだ。
「ロボットハンド自体はさまざまな分野で実用化されていますし、動きについてはかなり正確に操作できます。ただ、ロボットハンドが触れているものの重さや硬さはオペレータに伝わらないため、操作時の手応えは鉄の容器も紙コップも同じ。微妙な手加減を要する作業は難しいのが現状です。そういう問題を解決するものとして注目されているのが『バイラテラルサーボ機構』を搭載したロボットハンドなんですね」。
藤木研究室のメインテーマでもあるバイラテラルサーボ機構とは、作業中にロボットハンドの先端部分(スレーブ)が感知した負荷をそのまま「手応え」としてオペレータに伝えるもの。壊れやすい器具、危険な薬品を扱う際はもちろん、人間の体に直接触れる被災地での救助ロボットや医療用のロボットアームなど、実用化されれば応用範囲はきわめて広い。ロボット研究には将来的な発展を見すえた最先端技術の開発・確立を重視する向きも少なくないが、藤木研究室ではむしろ既存技術の応用が中心。「実際に使うこと、人の役に立つことが大前提ですから、当然、操作性や安全性も頭に入れた研究開発が必要だと思います」。研究室ではバイラテラルサーボ機構の実用化だけでなく、指を指すだけで位置を認識して移動するロボット、重量のある荷物などを1/6の負荷で持ち上げるパワーアシスト用のロボット、地雷撤去用のロボットなど、現実的なニーズを見すえた、リアリティのある取り組みも進められている。
「個人的な興味の源は『動くモノ』と『遠隔操作』ですね。結果としてロボットを対象にしていますが、自律型や二足歩行には全くこだわっていません。私にとってのロボットは人間の手足として普通に使える機械。テレビや電子レンジと同じなんです」。いずれのテーマも理論的な構築はほぼ終わっているという藤木研究室。次なる課題はいよいよ「遠隔操作で動く」、現実のモノづくりだ。
ビデオ
トラックバック(0)
トラックバックURL: http://kitnetblog.kitnet.jp/mt/mt-tb.cgi/250
コメントする