| 知能ロボット研究促進のために提唱された国際プロジェクトRoboCup、その研究成果発表の場として1997年から自律型ロボットによるサッカーの国際大会が開催されている。今ではサッカー以外の競技も開催され、急速にその規模を拡大している。KITは99年からこの世界的イベントへの挑戦を続け、出村研究室ではその技術的なサポートを行っている。その理由は「毎年、レギュレーションの変更はありますが、ロボカップサッカーの競技内容はサッカーのみ。競技内容が変わらなければ技術の積み重ねができますし、世界規模のオープン競技なので国際的な技術交流もはかれる。それらの点がロボットの技術開発に最適と判断し、研究実践の場として参戦を決めたんです」。 |
研究室は夢考房RoboCupプロジェクトとの共同研究で、2002年から3年連続で世界大会準優勝という快挙も成し遂げたが、そこにはルーチン化やマンネリ化はまったくない。レギュレーションが毎年変更され、常に新たな研究課題に直面しているからだ。「昨年は12m×8mだったフィールドが今年は18m×12m。来年からはゴールやコーナーポストの色がなくなる。数年後には屋外での開催も計画されています。10年以内には国立競技場で試合をし、満員にしたいですね」。
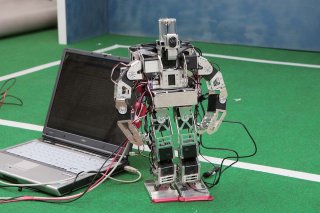
昨年はこれまで出場してきた中型ロボット部門に加え、犬型の自律ロボット「AIBO」による四脚ロボットリーグにも参戦。今年のジャパンオープンには身長50センチほどのロボット2台によるヒューマノイドリーグにも初参戦し、準優勝したチームに3対1と善戦した。現在はボールやフィールドなど識別する物を色で判断しているが、刻々変化する自然光とさまざまな色があふれる屋外での試合には、これまでにない機構も必要となる。こうした取り組みの中で出村先生が重視しているのはソフトウェア開発技術の向上だ。ロボットのハードウェアについては夢考房RoboCupプロジェクトが主に開発し、研究室では数年後を睨み先端的なソフトウェア開発を行っている。
「自律型ロボットを正常に動かすためには、自分の位置や周囲の状況を正確に把握させなくてはなりません。
ロボットに搭載したカメラから収集される膨大な視覚情報を、迅速かつ正確に分析する画像処理ソフトの開発は非常に重要。また、随所に組み込まれたソフトウェアのバグや、膨大な計算量を必要とする遺伝的アルゴリズム、強化学習のチェックにはシミュレーション・ソフトが不可欠なんです」。
ロボットという実機実体に目を奪われがちだが、それを制御する高度なソフトウェアの開発こそ出村研究室の真のテーマであり、そこで生まれた技術とノウハウを人間社会にフィードバックすることが真の目的といっていいだろう。目で見て周囲の状況を判断し、仲間と連携しながら自分で考え、行動する。それはまさに介護や救護、医療など「街に出て人間と接するロボット」に欠かせない能力なのだ。
| 
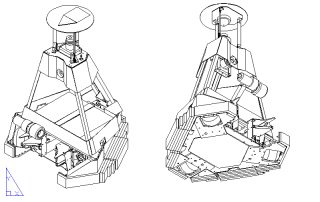
夢考房RoboCupプロジェクトと共同開発中のヒューマノイドロボットの脚部。完成するとHONDAのASIMOクラスとなる。設計は出村研究室の益子君、寺崎君が担当した。 |
ビデオ
| ヒューマノイドロボット脚部の動作試験 [ここをクリック]
夢考房ロボカッププロジェクトと共同開発しているヒューマノイドロボット脚部の動作試験。設計は出村研の益子、寺崎君が担当し、金属加工、製作は夢考房RoboCupプロジェクトの学生が担当した。完成するとホンダのASIMOクラスのロボットとなる。来年のRoboCup Japan Open ヒューマノイドリーグ・ティーンサイズに出場するため急ピッチで開発が進められている。 | RoboCup Japan Open 2007 ヒューマノイドリーグ・キッズサイズ [ここをクリック]
ドイツから参加したDarmstadt Dribblersチームと出村研究室(deura.netチーム)との試合。左側に見えるロボット(水色マーカ)が出村研の石田君が設計・製作したロボット。背中に超小型コンピュータ(VAIO TYPE U)を搭載し、頭と胸に搭載したカメラで環境を認識し自律で動いている。現在はこの技術を夢考房プロジェクトに移転し、来年からはRoboCupには夢考房チームとして参加する。出村教授は夢考房RoboCupプロジェクトの指導責任者も兼任しているので研究室には夢考房プロジェクト出身者も多数在籍している。学部生では困難な新技術の開発に力を注いでいる。
|
|
コメントする